Incremental and Absolute Position Encoder
1. Tujuan
- Mengetahui pengertian rotary encoder, incremental dan absolute encoder.
- Mengetahui prinsip kerja rotary encoder.
- Membuat rangkaian encoder.
2. Alat dan Bahan
1. Motor Driver L298

Gambar 1. Motor Driver L298
2. Motor DC

Gambar 2. Motor DC
3. Dioda

Gambar 3. Dioda

Gambar 4. Power
5. Resistor

Gambar 6. Resistor
7. LED


Gambar 7. LED
[kembali]
3. Teori







4. Rangkaian dan Prinsip Kerja
A. Rangkaian simulasi proteus :

B. Prinsip Kerja
Untuk Lebih Jelasnya, Maka Lihat Tabel acuan arah Motor DC dibawah ini :

[kembali]
5. Video Simulasi
Untuk video simulasi dapat di lihat pada video dibawah :
[kembali]
6. Link Download
Download File Rangkaian Disini
Download Video Simulasi Disini
Download HTML Disini
Download Library Motor Driver L298 Disini
Download Datasheet L298 Disini
Download Datasheet Incremental Encoder Disini
Download Datasheet Absolute Encoder Disini
[kembali]
1.
Pengertian Encoder
Rotary encoder adalah
divais elektromekanik yang dapat memonitor gerakan dan posisi. Rotary encoder
umumnya menggunakan sensor optik untuk menghasilkan serial pulsa yang dapat
diartikan menjadi gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros
benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary
encoder untuk diteruskan oleh rangkaian kendali. Rotary encoder umumnya
digunakan pada pengendalian robot, motor drive, dsb.
Rotary encoder tersusun
dari suatu piringan tipis yang memiliki lubang-lubang pada bagian
lingkaran piringan. LED ditempatkan pada salah satu sisi piringan sehingga
cahaya akan menuju ke piringan. Di sisi yang lain suatu photo-transistor
diletakkan sehingga photo-transistor ini dapat mendeteksi cahaya dari LED yang
berseberangan. Piringan tipis tadi dikopel dengan poros motor, atau divais
berputar lainnya yang ingin kita ketahui posisinya, sehingga ketika motor
berputar piringan juga akan ikut berputar. Apabila posisi piringan
mengakibatkan cahaya dari LED dapat mencapai photo-transistor melalui
lubang-lubang yang ada, maka photo-transistor akan mengalami saturasi dan akan
menghasilkan suatu pulsa gelombang persegi. Gambar 1 menunjukkan bagan skematik
sederhana dari rotary encoder. Semakin banyak deretan pulsa yang dihasilkan
pada satu putaran menentukan akurasi rotary encoder tersebut, akibatnya semakin
banyak jumlah lubang yang dapat dibuat pada piringan menentukan akurasi rotary
encoder tersebut.
Terdapat 2 jenis Rotary
Encoder, yaitu :
1. Absolut
Encoder
Absolute encoder
menggunakan piringan dan sinyal optik yang diatur sedemikian sehingga dapat
menghasilkan kode digital untuk menyatakan sejumlah posisi tertentu dari poros
yang dihubungkan padanya. Piringan yang digunakan untuk absolut encoder
tersusun dari segmen-segmen cincin konsentris yang dimulai dari bagian tengah
piringan ke arah tepi luar piringan yang jumlah segmennya selalu dua kali
jumlah segmen cincin sebelumnya. Cincin pertama di bagian paling dalam memiliki
satu segmen transparan dan satu segmen gelap, cincin kedua memiliki dua segmen
transparan dan dua segmen gelap, dan seterusnya hingga cincin terluar. Sebagai
contoh apabila absolut encoder memiliki 16 cincin konsentris maka cincin
terluarnya akan memiliki 32767 segmen. Gambar 3 menunjukkan pola cincin pada
piringan absolut encoder yang memiliki 16 cincin.
Gambar 8. contoh
susunan pola 16 cincin konsentris pada absolut encoder.
Karena setiap cincin
pada piringan absolute encoder memiliki jumlah segmen kelipatan dua dari cincin
sebelumnya, maka susunan ini akan membentuk suatu sistem biner. Untuk
menghasilkan sistem biner pada susunan cincin maka diperlukan pasangan LED dan
photo-transistor sebanyak jumlah cincin yang ada pada absolut encoder
tersebut.
Gambar 9. Contoh
piringan dengan 10 cincin dan 10 LED – photo-transistor untuk membentuk sistem
biner 10 bit.
Sistem biner yang
untuk menginterpretasi posisi yang diberikan oleh absolute encoder dapat
menggunakan kode gray atau kode biner biasa, tergantung dari pola cincin yang
digunakan. Untuk lebih jelas, kita lihat contoh absolut encoder yang hanya
tersusun dari 4 buah cincin untuk membentuk kode 4 bit. Apabila encoder ini
dihubungkan pada poros, maka photo-transistor akan mengeluarkan sinyal persegi
sesuai dengan susunan cincin yang digunakan. Gambar 4 dan 65menunjukkan contoh
perbedaan diagram keluaran untuk absolute encoder tipe gray code dan tipe
binary code.
Gambar 10. Contoh
diagram keluaran absolut encoder 4-bit tipe gray code
Dengan absolute encoder
4-bit ini maka kita akan mendapatkan 16 informasi posisi yang berbeda yang
masing-masing dinyatakan dengan kode biner atau kode gray tertentu. Tabel 1
menyatakan posisi dan output biner yang bersesuaian untuk absolut encoder 4-bit.
Dengan membaca output biner yang dihasilkan maka posisi dari poros yang kita
ukur dapat kita ketahui untuk diteruskan ke rangkaian pengendali. Semakin
banyak bit yang kita pakai maka posisi yang dapat kita peroleh akan semakin
banyak.
Gambar 11. Contoh diagram
keluaran absolut encoder 4-bit tipe binary code
Output biner dan posisi
yang bersesuaian pada absolute encoder 4-bit, seperti pada tabel
Tabel 1. Output
biner dan posisi yang bersesuaian pada absolute encoder 4-bit
2. Incremental
Encoder
Incremental encoder dapat digunakan untuk mengukur posisi sudut dari
sebuah shaft yang berotasi Incremental encoder menggunakan sebuah
piringan dengan beberapa lubang berupa garis. Piringan ini diletakkan
diantara sebuah LED dan photosensor (photodiode, phototransistor). Berikut
struktur incremental encoder.

Gambar 12.
Cahaya dari LED akan
melewati piringan melalui lubang-lubang piringan, yang kemudian akan diterima
oleh photosensor. Karena adanya lubang ini, maka sinyal yang terdeteksi
photodiode akan berupa pulsa. Dari pulsa inilah nantinya dapat diketahui seberapa
jauh dan cepat shaft berputar. Untuk menentukan arah putaran shaft, biasanya
digunakan dua buah LED dan fotodioda sebagai penghasil pulsanya, sehingga
terdapat dua channel dengan posisi LED dan fotodioda seperti gambar :Saat
channel A mendahului channel B, maka dapat diketahui shaft berputar searah
jarum jam, dan sebaliknya jika channel B mendahului channel A, maka shaft
berputar berlawanan jarum jam.
Gambar13.
Pada gambar diatas
terdapat sinyal Marker, sinyal Marker ini biasa disebut index signal. Sinyal
ini berfungsi untuk menentukan posisi nol dengan cara memberikan pulsa tunggal
setiap satu revolusi.
Resolusi dari incremental encoder dapat lebih baik dengan cara menambah
jumlah lubang pada piringan. Jumlah lubang ini sama dengan jumlah dari pulsa
per satu revolusi. Sebagai contoh, jika sebuah incremental encoder memiliki
1000 lubang, dan telah berputar sebanyak 180 derajat, maka pulsa yang
dihasilkan sebanyak 500 pulsa. Kelemahan incremental encoder
adalah saat supply dimatikan, maka pembacaan posisi shaft akan ter reset.
Grafik respon Encoder

[kembali]
Grafik respon Encoder
Gambar 14. Grafik respon Encoder
[kembali]
A. Rangkaian simulasi proteus :
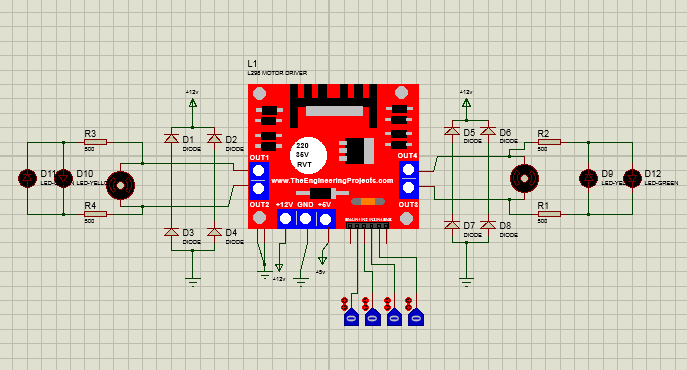
Gambar 15. Rangkaian Rotary Encoder
Prinsip kerja dari driver motor L298 jika memberikan logika 1 pada Pin EN1 dan Pin EN2, yang akan menyebabkan motor DC 1 (yang terhubung ke Output A) dan motor DC 2 (yang terhubung ke Output B) menjadi aktif.
Jika IN1 diberi logika 1 dan IN2 diberi logika 0 maka motor DC 1 (yang terhubung ke ouput A) akan berputar berlawanan arah jarum jam dan LED D10 berwarna Yellow/Kuning akan menyala sebagai indikator perputaran motor berlawanan arah jarum jam.
Jika IN1 diberi logika 0 dan IN2 diberi logika 1 maka motor DC 1 (yang terhubung ke output A) akan berputar searah jarum jam dan LED D11 berwarna Green/Hijau akan menyala sebagai indikator motor berputar searah jarum jam.
Jika IN1 dan IN2 diberi logika yang sama yaitu 1 atau 0 maka motor DC 1 (yang terhubung ke Output A ) akan Berhenti.
Jika IN3 diberi logika 1 dan IN4 diberi logika 0 maka motor DC 2 (yang Terhubung ke Output B) akan berputar berlawanan arah jarum jam dan LED D9 berwarna Yellow/Kuning akan menyala sebagai indikator perputaran motor berlawanan arah jarum jam.
Jika IN3 diberi logika 0 dan IN4 diberi logika 1 maka motor DC 2 (yang terhubung ke Ouput B) akan berputar searah jarum jam dan LED D12 berwarnaGreen/Hijau akan menyala sebagai indikator motor berputar searah jarum jam.
Jika IN3 dan IN4 diberi logika yang sama yaitu 1 atau 0 maka motor DC 2 (yang Terhubung ke Output B) akan Berhenti.
Resistor yang tehubung ke motor berfungsi untuk menghambat agar laju motor DC berkurang Dan LED nyala.
Dioda pada rangkaian ini digunakan untuk menahan arus balik yang ditimbulkan dari motor yang akan menuju Motor Driver L298.
Untuk Lebih Jelasnya, Maka Lihat Tabel acuan arah Motor DC dibawah ini :
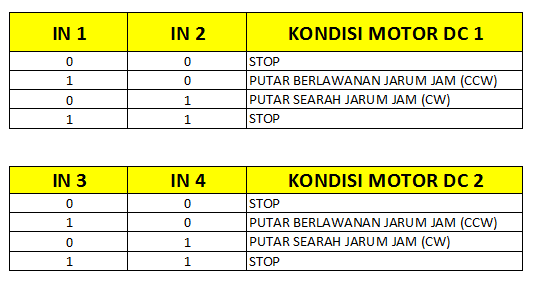
Tabel 2.
[kembali]
5. Video Simulasi
Untuk video simulasi dapat di lihat pada video dibawah :
[kembali]
6. Link Download
Download File Rangkaian Disini
Download Video Simulasi Disini
Download HTML Disini
Download Library Motor Driver L298 Disini
Download Datasheet L298 Disini
Download Datasheet Incremental Encoder Disini
Download Datasheet Absolute Encoder Disini
[kembali]
Tidak ada komentar:
Posting Komentar